Master and Slave Robot Arm
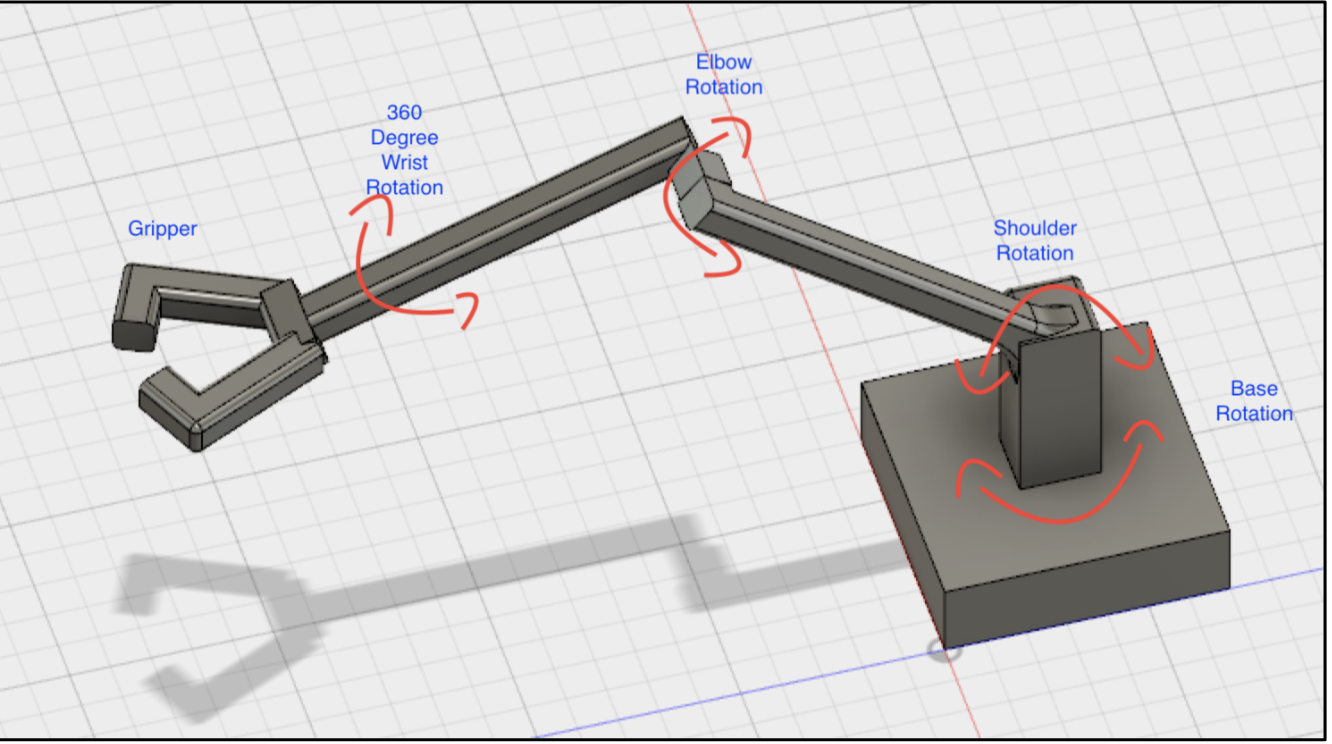 Picture a person aboard the International Space Station moving the Master Arm and being able to guide the Slave Arm as it fixes a satellite remotely. Master and Slave Robot Arm have two major parts: arms control and the robot arm. The arms control will design base on the design of the robot arm. In another word, it looks like two identical arms. Whenever the arms control move, the robot arm will follow the same direction.
Picture a person aboard the International Space Station moving the Master Arm and being able to guide the Slave Arm as it fixes a satellite remotely. Master and Slave Robot Arm have two major parts: arms control and the robot arm. The arms control will design base on the design of the robot arm. In another word, it looks like two identical arms. Whenever the arms control move, the robot arm will follow the same direction.
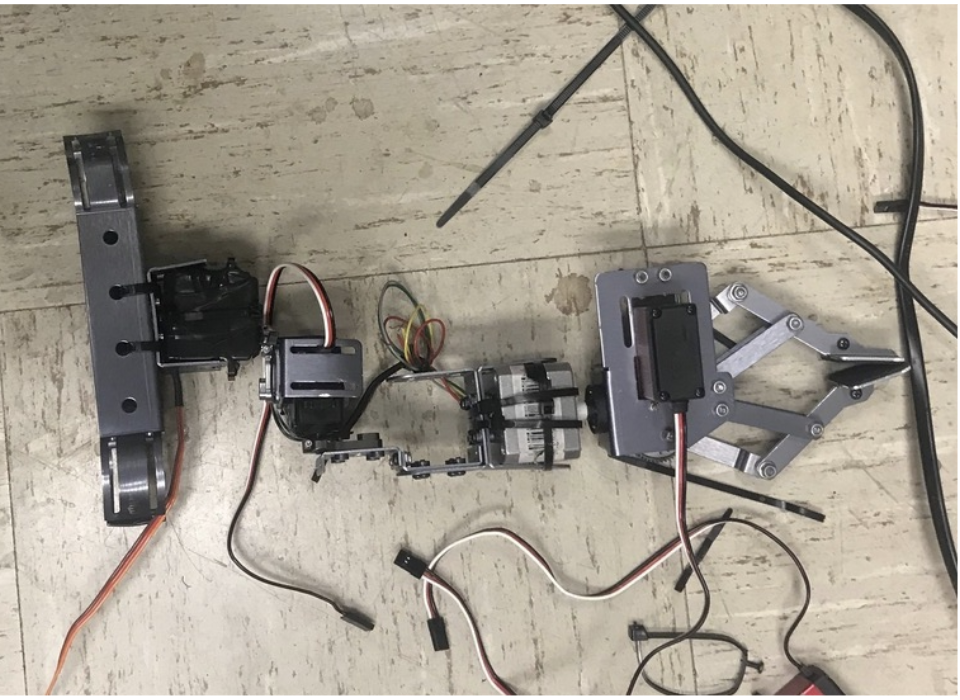 I studied a lot from this project since I have to do everything from designing, wiring, programming. I tried both Raspberry pi 3B and Arduino to make the arm. Although both of them were worked, I ended up using the Arduino for the prototype and final product.
I studied a lot from this project since I have to do everything from designing, wiring, programming. I tried both Raspberry pi 3B and Arduino to make the arm. Although both of them were worked, I ended up using the Arduino for the prototype and final product.
You can see my prototype video at here.